State of the Art technologies and verification tools for a new generation of train positioning system with GNSS-IMU and Video-based sensors
After the positive outcomes from VOLIERA phase 1 project – Video Odometry with Lidar and EGNSS for ERTMS Applications – ESA has awarded to Hitachi Rail STS teaming with Radiolabs a second phase to develop a prototype ready for testing in railway environment and the simulation platform to verify the performance in virtualised scenarios.
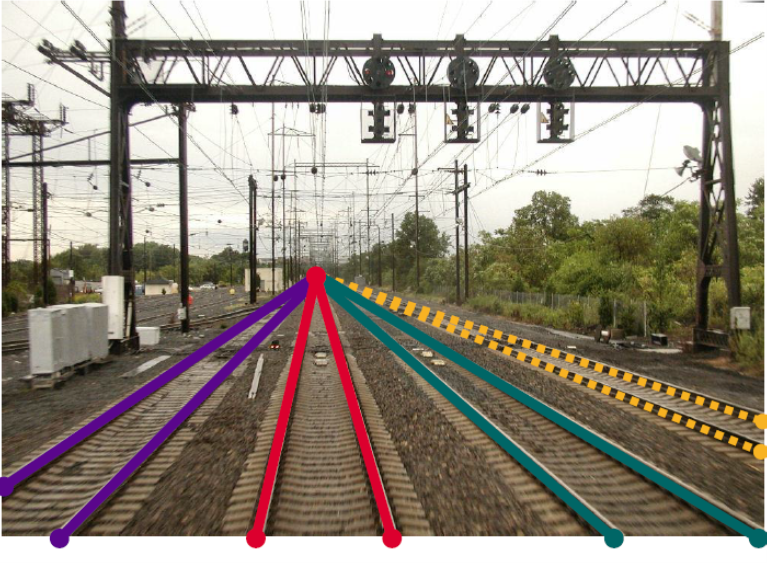
VOLIERA represents a step-change innovation for the ERTMS train control systems to enhance the capabilities of the train positioning system beyond the state of the art. The core of VOLIERA is a multi-sensor architecture to combining signals detected by video-based sensors with those of GNSS and IMU. This approach exploits the latest sensor technologies developed for the automotive sector combined with GNSS-IMU and new algorithms and processing capabilities. The goal is to determine the absolute train position, track discrimination and video odometry with high accuracy and integrity everywhere and anytime including tunnels, urban canyons, and stations. Furthermore, the video sensor will allow also to monitor the railways line in real time beyond what is visible with the eyes of the driver and to detect landmarks.
VOLIERA technologies will enable new and innovative stand-alone Train Positioning system products along with the tools for the characterization of its functions and their verification both on nominal and degraded operational scenarios.
The project is co-funded by ESA NAVISP-2 program with the financial contribution of ASI.
