Future automatic driving systems shall be safe and cyber-secure by design to manage any situation within the operational domain. Challenges to overcome are the environment perception capabilities of the vehicle’s sensors to perform safely dynamic driving tasks and to interact with other road users with limited supervision of the driver and in perspective in a driverless mode.
Real time vehicle localisation with high accuracy, integrity and continuity is a crucial resource for autonomous driving cars to guarantee at least the same level of safety as if the car was manually driven.
Hybrid Visual-GNSS-IMU sensor suits are being designed to complementing stand-alone video sensors capabilities, in particular for the road signals detection, line-keeping, speed limit enforcement. These functions require a fail-safe combination of GNSS and IMU data, together with images captured by visual sensors to assess their capabilities in all the operational and environmental scenarios where the vehicle is supposed to travel. In this respect car makers and tier-1 suppliers are testing perception sensors with vehicles travelling along specific roads. Since multi-sensor suits are made by diverse technologies and each sensor must be characterised in the operational scenario, a standard process to acquire the positioning data respect to a reference ground truth is a pre-requisite for evaluating the safety. Having to manage large datasets, the entire acquisition and processing chain should be unsupervised, especially for supporting a standard validation and certification phase.
These challenges will be turning into the STEV – Satellite Test bed for EGNSS based Vehicle Localization Validation – project funded by ASI-ESA and coordinated by Radiolabs, with INTECS as partner. The aim is an independent infrastructure for on-field data collection and playback by GNSS, inertial and visual technologies, operating on selected operational scenarios for vehicular applications including motorcycles. ANAS – an innovative joint stock company, managing 32,000 Km of roads, that operates at national and international level with Ferrovie dello Stato Italiane as sole shareholder – will contribute to the project in relation to their Smart Road initiative. Honda Italia will also provide a contribution to the project for its focus on the future assisted driving technologies that are key to improve the safety of motorcycles. Furthermore, the data collected and processed on the roads will be useful for assessing the performance of multi-sensor suits also for safe train positioning applications to reduce the need of ad-hoc test campaigns along railways lines in consideration of the similarity of the road and rail environment and user requirements.
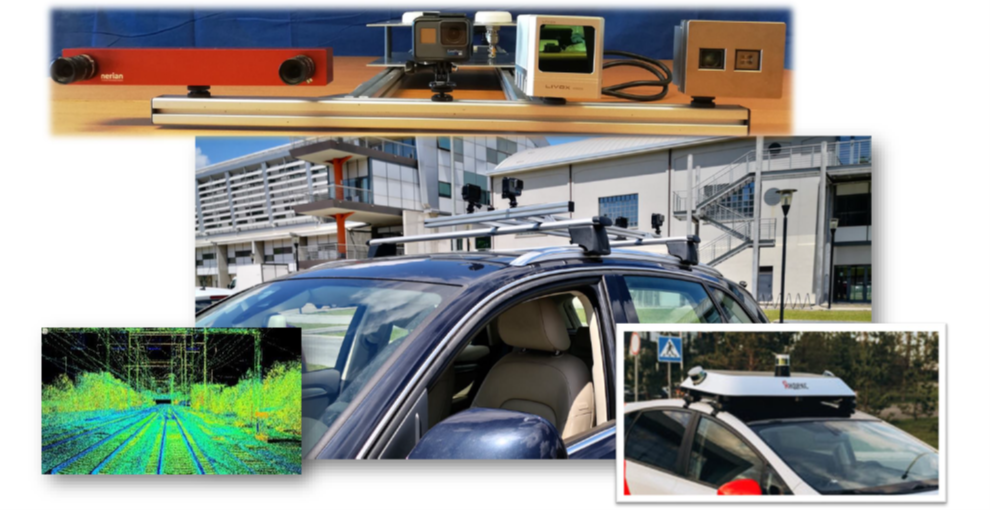
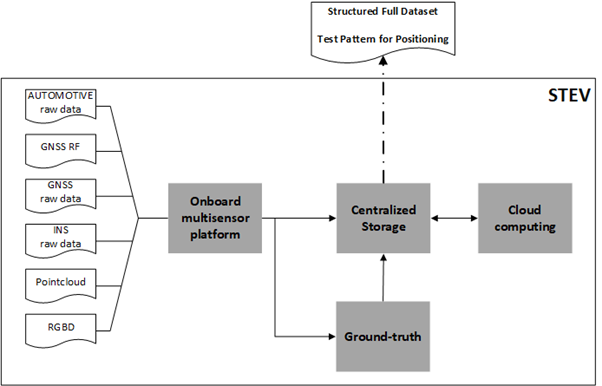
The architecture of STEV consists of a multi-sensor On-Board Unit (OBU), a recorder, a dedicated vehicle and a centralised processing facility. A ground truth segment unit will be also developed and validated as the independent and trustable reference against which to measure the performance of each sensor in the position domain.
The OBU will be installed also on a vehicle of ANAS for the Smart Road initiative and on a motorcycle of HONDA Italia. The overall system is designed according to standard procedures to collect a reliable and reproducible set of data from GNSS, IMU, Optical Camera, LIDAR sensors and from the CAN bus installed on different vehicles while travelling along roads representative of the operational environments.
Initial data for the commissioning of the STEV system will be collected on some 10,000 Km of field tests with vehicles driving along urban, mountainous, sub-urban roads. ANAS will contribute to the definition of use cases and to the test campaign on the selected Smart Road sections, through vehicles equipped with the multi-sensor OBU. Honda Italia will contribute to the definition of user requirements for the motorcycle’s operational scenarios and to the experimental phase providing a motorcycle equipped with the multi-sensor OBU.
The testbed is designed for continuous data acquisition up to 8h @1.5Gb/s with local storage of 6TB. The recorded data will be processed for the production of reference test patterns to assess the real behaviour of vehicle’s positioning in the operational scenarios and for supporting the validation and certification process.
 The STEV infrastructure will complement the P-CAR Validation and Certification Laboratory under development in the town of L’Aquila, for building a seamless one stop shopping Accredited Center in Europe to evaluating and assessing the localization, communication, cybersecurity technologies for the connected and autonomous vehicles to behave safely on public roads according to established safety standards.
The STEV infrastructure will complement the P-CAR Validation and Certification Laboratory under development in the town of L’Aquila, for building a seamless one stop shopping Accredited Center in Europe to evaluating and assessing the localization, communication, cybersecurity technologies for the connected and autonomous vehicles to behave safely on public roads according to established safety standards.
Radiolabs is a member of National Transport Cluster (LINK), Polo Innovazione Automotive Abruzzo (LINK) and ICT Aerospazio Abruzzo (LINK)


